I Servomotori
Ci sto lavorando
Documentazione: |
|
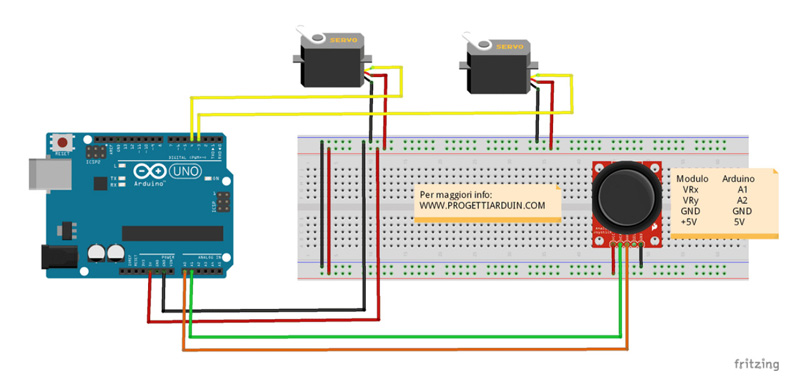
| Schema rotazione destra sinista - comandata da potenziometro | |
| Schema con pulsante singolo - Codice | |
| How to: Mod servo for continous rotation | |
Pulsante premuto ruota in un verso premuto di nuovo ruota nell'altro verso
Codice:
#include <Servo.h>
Servo myservo; // Crea un oggetto servo per controllare un servo
#define servoPin 3 //~
#define pushButtonPin 2
const int minAngle = 60;
const int maxAngle = 120; // Angolo massimo ma anche angolo iniziale per servo
int flag = 0;
void setup() {
myservo.attach(servoPin); // Collega il servo al pin 3
pinMode(pushButtonPin,INPUT_PULLUP);myservo.write(maxAngle); //Angolo iniziale
}
void loop() {
if(digitalRead(pushButtonPin) == LOW){
if (flag == 0) flag = 1;
else
flag = 0;}
if (flag) angle = minAngle;else
angle = maxAngle;
}
myservo.write(angle); // Sposta il servo all'angolo desiderato
delay (500);
}
}