Motori a spazzole
Brushed motor
Documentazione: |
|
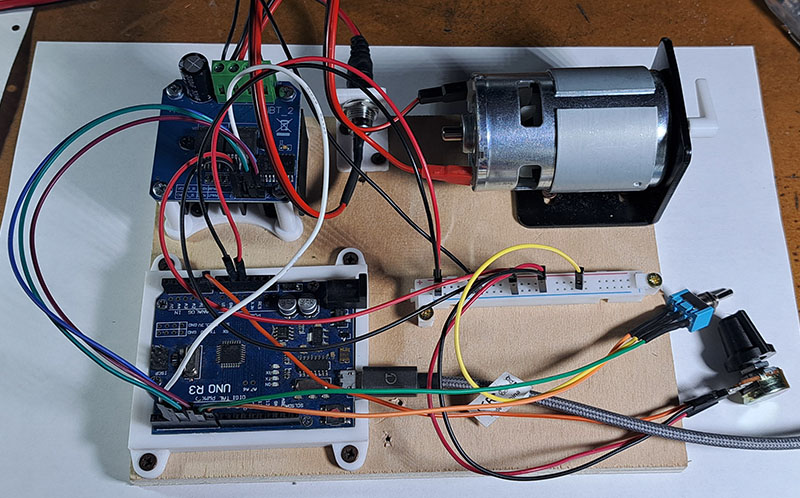
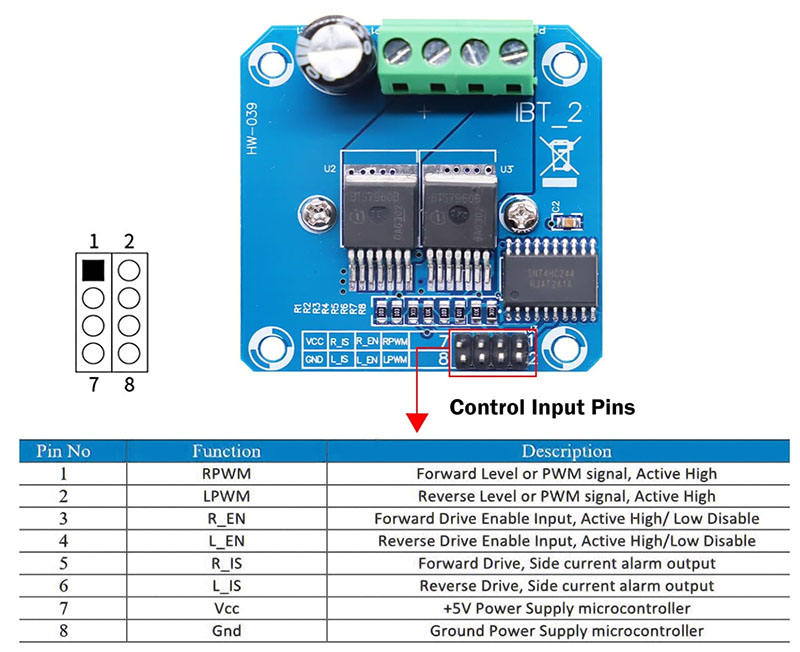
Per pilotare motori a spazzole fino a 24 V e 43 A si può fare uso del modulo: BTS7960 IBT-2.
Vedi Video qui
![]()
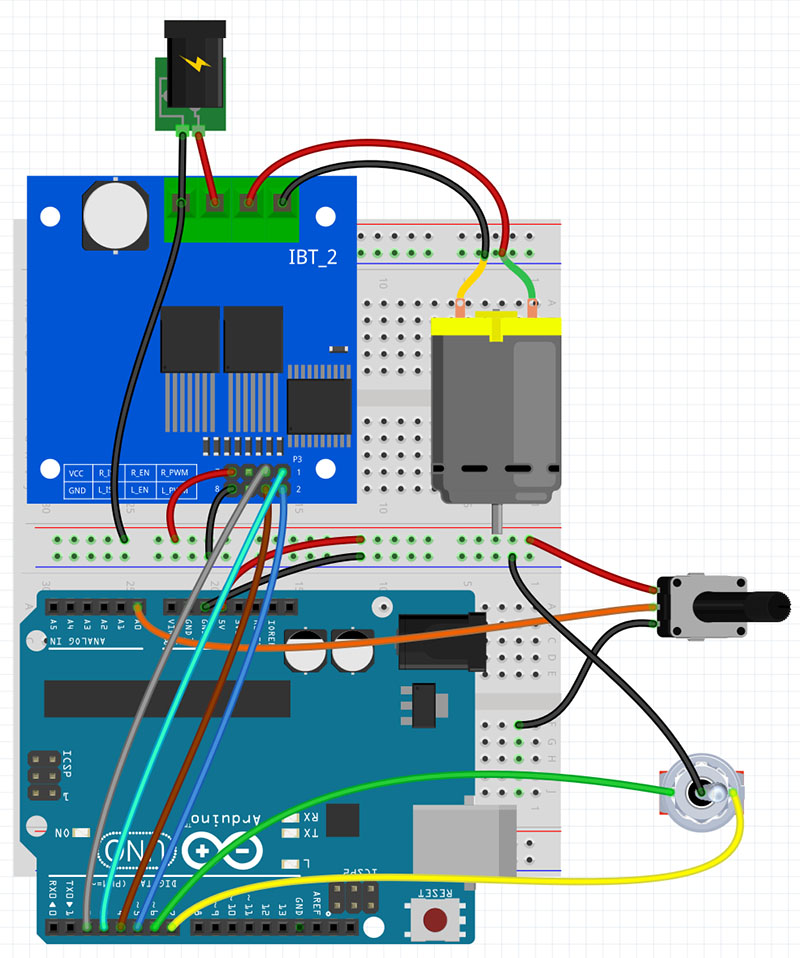
1️⃣ Collegamenti tra Arduino e BTS7960
| Pin BTS7960 | Collegamento ad Arduino | Descrizione |
|---|---|---|
| RPWM | 3(PWM) | Controlla velocità verso destra |
| LPWM | 5 (PWM) | Controlla velocità verso sinistra |
| R_EN | 2 (Digital Output) | Abilita il senso di rotazione orario (destra) |
| L_EN | 4(Digital Output) | Abilita il senso di rotazione antiorario (sinistra) |
| R_IS | GND (o libero) | Disattiva il monitor di corrente |
| L_IS | GND (o libero) | Disattiva il monitor di corrente |
| VCC | 5V di Arduino | Alimentazione del modulo |
| GND | GND di Arduino | Massa comune |
| M+ | Motore (polo positivo) | Uscita verso il motore |
| M- | Motore (polo negativo) | Uscita verso il motore |
| B+ | Batteria (polo positivo) | Alimentazione 12 V |
| B- | Batteria (polo negativo) | Alimentazione 12 V |
2️⃣ Collegamenti dell'interruttore
| Pin Interruttore | Collegamento ad Arduino |
|---|---|
| Centrale | GND |
| Lato sinistro | Pin 6 |
| Lato destro | Pin 7 |
3️⃣ Collegamenti del potenziometro
| Pin Potenziometro | Collegamento ad Arduino |
|---|---|
| Sinistro | GND |
| Centrale | A0 (Lettura analogica) |
| Destro | 5V |
Abiliteremo la pull-up interna, che porta il segnale a HIGH (5V) di default e lo mette a LOW (0V) solo quando il contatto è chiuso.
Codfice: |
|
const int I_SX = 6; // Pin collegato al lato sinistro dell'interruttore
const int I_DX = 7; // Pin collegato al lato destro dell'interruttore
const int Pot = A0; // Pin del potenziometro
const int R_PWM = 3; // Controlla velocità verso destra (PWM)
const int L_PWM = 5; // Controlla velocità verso sinistra (PWM)
const int R_EN = 2; // Abilita direzione destra
const int L_EN = 4; // Abilita direzione sinistra
const float coeff = 40.14; // Coefficiente per calcolo RPM
void setup() {
pinMode(I_SX, INPUT_PULLUP);
pinMode(I_DX, INPUT_PULLUP);
pinMode(R_EN, OUTPUT);
pinMode(L_EN, OUTPUT);
pinMode(R_PWM , OUTPUT);
pinMode(L_PWM, OUTPUT);
digitalWrite(R_EN, HIGH);
digitalWrite(L_EN, HIGH);
Serial.begin(115200);
}
void loop() {
bool sinistra = !digitalRead(I_SX); // Invertiamo perché il pull-up rende HIGH di default
bool destra = !digitalRead(I_DX); // Invertiamo perché il pull-up rende HIGH di default
int potValue = analogRead(Pot);
int motorSpeed = map(potValue, 0, 1023, 0, 255); // Mappa il valore del potenziometro a un valore PWM
int rpm = motorSpeed * coeff; // Calcolo degli RPM
if (sinistra) {
analogWrite(R_PWM , 0); // Assicuriamoci che RPWM sia spento
analogWrite(L_PWM, motorSpeed);
}
else if (destra) {
analogWrite(L_PWM, 0); // Assicuriamoci che LPWM sia spento
analogWrite(R_PWM , motorSpeed);
}
else {
analogWrite(R_PWM , 0);
analogWrite(L_PWM, 0);
rpm = 0; // Se il motore è fermo, gli RPM sono zero
}
Serial.print("Sx: "); Serial.print(sinistra);
Serial.print(" - Dx: "); Serial.print(destra);
Serial.print(" - Vel: "); Serial.print(motorSpeed);
Serial.print(" - RPM: "); Serial.println(rpm);
delay(100);
} |
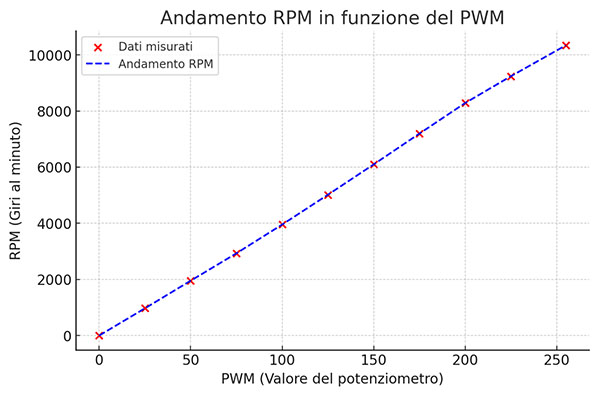
Il coefficente di conversione valori del potenziometro in RPM è stato calcolato tramite campionamento con tachimetro laser. La tabella delle corrispondenzerilevate è la seguente:
|
 |
-
Calcolo del rapporto (coefficiente) per ciascun punto:
Il coefficiente è dato dalla formula:
Ad esempio, per il primo dato:
E così via per tutti gli altri valori.
-
Coefficiente medio: Il coefficiente medio viene calcolato come la media aritmetica di tutti i coefficienti ottenuti:

-
La media di questi coefficienti è 40.14, che è il valore che puoi utilizzare nel tuo codice per stimare gli RPM.