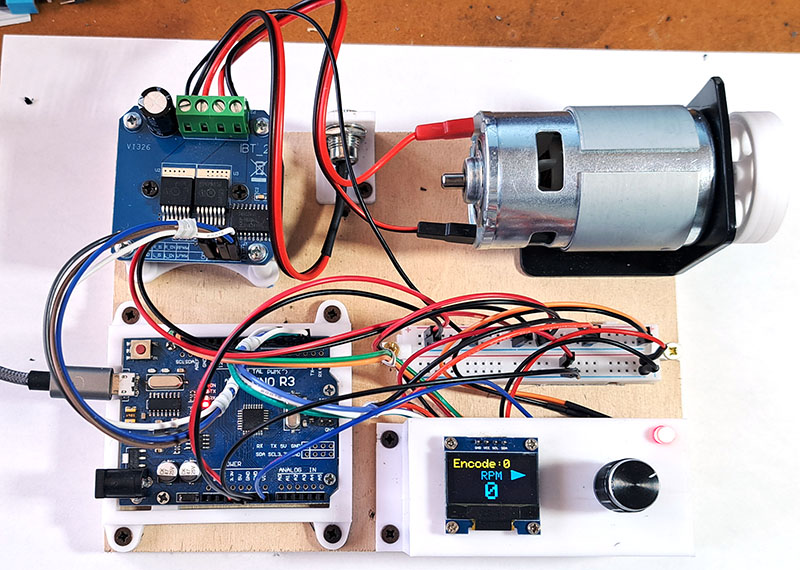
Motori a spazzole
Brushed motor
Documentazione: |
|
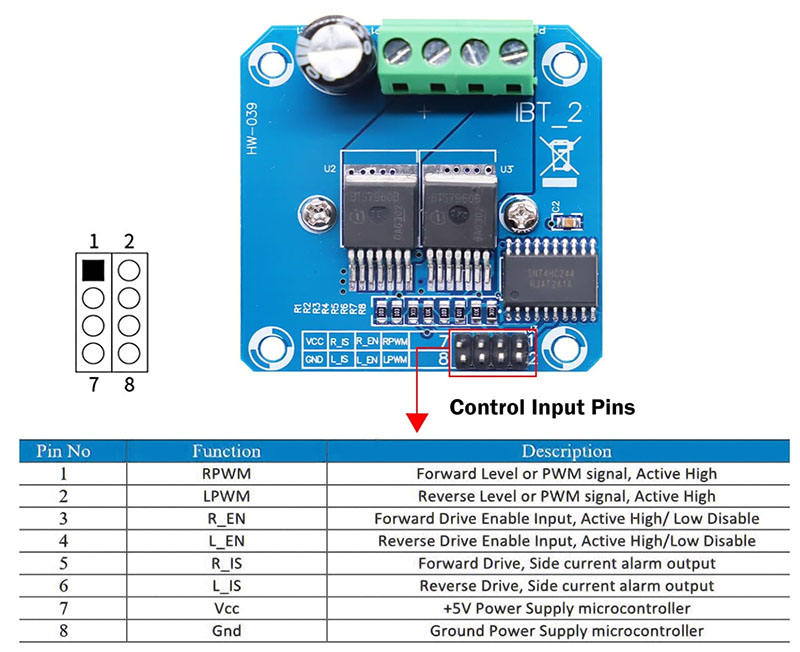
Per pilotare motori a spazzole fino a 24 V e 43 A si può fare uso del modulo: BTS7960 IBT-2.
Vedi Video qui
Funzionamento: la rotazine dell'encoder per il controllo della velocità, un clik per lo stop ed un long press per il cambio di direzione. Monitor oled per la visualizzazione dei giri per minuto.
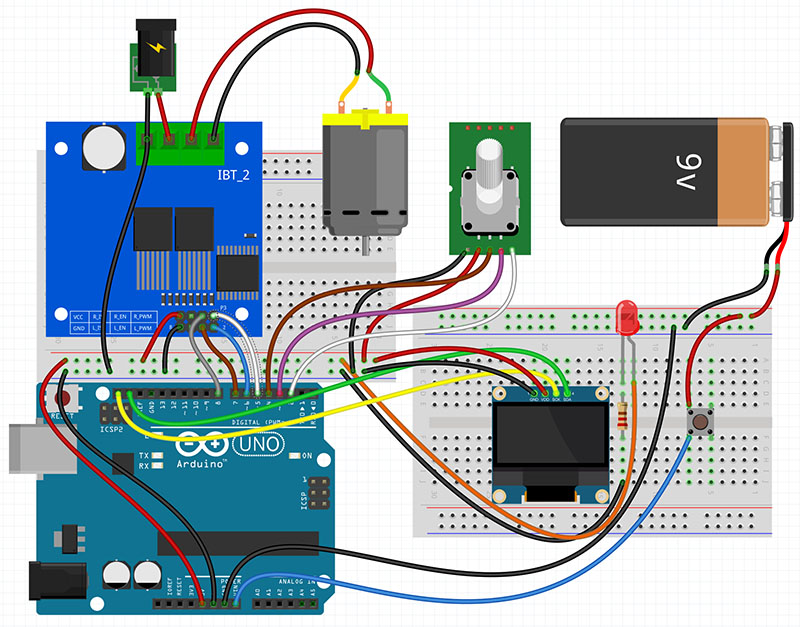
1️⃣ Collegamenti tra Arduino e BTS7960
| Pin BTS7960 | Collegamento ad Arduino | Descrizione |
|---|---|---|
| RPWM | 5(PWM) | Controlla velocità verso destra |
| LPWM | 6 (PWM) | Controlla velocità verso sinistra |
| R_EN | 8 (Digital Output) | Abilita il senso di rotazione orario (destra) |
| L_EN | 7(Digital Output) | Abilita il senso di rotazione antiorario (sinistra) |
| R_IS | GND (o libero) | Disattiva il monitor di corrente |
| L_IS | GND (o libero) | Disattiva il monitor di corrente |
| VCC | 5V di Arduino | Alimentazione del modulo |
| GND | GND di Arduino | Massa comune |
| M+ | Motore (polo positivo) | Uscita verso il motore |
| M- | Motore (polo negativo) | Uscita verso il motore |
| B+ | Batteria (polo positivo) | Alimentazione 12 V |
| B- | Batteria (polo negativo) | Alimentazione 12 V |
2️⃣ Collegamenti encoder
| Pin Encoder | Collegamento ad Arduino |
|---|---|
| CLK | Pin 2 |
| DT | Pin 3 |
| SW | Pin 4 |
| V+ | 5V |
| GND | GND |
Abiliteremo la pull-up interna del Pin 4 (SW il pulsante dell'encoder), che porta il segnale a HIGH (5V) di default e lo mette a LOW (0V) solo quando il contatto è chiuso.
Codfice: |
|
#include <Wire.h>
#include <Encoder.h>
#include <Adafruit_SSD1306.h>
#include <OneButton.h>
#include "images.h"
//Definizioni per l'encoder
const int CLK_PIN = 2;
const int DT_PIN = 3;
const int BUTTON_PIN = 4;
// Definizioni per il display OLED
const int OLED_I2C_ADDRESS = 0x3C;
const int OLED_WIDTH = 128;
const int OLED_HEIGHT = 64;
//Definizioni Modulo BTS7960
const int R_PWM = 5; // Controlla velocità verso destra (PWM)
const int L_PWM = 6; // Controlla velocità verso sinistra (PWM)
const int R_EN = 8; // Abilita direzione destra
const int L_EN = 7; // Abilita direzione sinistra
// inizializzazione Encoder
Encoder encoder(DT_PIN, CLK_PIN);
// Inizializzazione display OLED
Adafruit_SSD1306 oled(OLED_WIDTH, OLED_HEIGHT);
// Inizializzazione OneButton
OneButton button(BUTTON_PIN, true);
int lastEncoderValue = 0;
int lastButtonState = LOW;
bool direction = false;
// Coefficiente per il calcolo degli RPM
const float coefficienteRPM = 40.14; // calibrato con tachimetro
void setup() {
// Inizializza il display OLED
if (!oled.begin(SSD1306_SWITCHCAPVCC, OLED_I2C_ADDRESS)) {
while (true);
}
pinMode(BUTTON_PIN, INPUT_PULLUP);
button.setPressMs(300); // Imposta il tempo per la pressione lunga a 500 ms
encoder.write(0);
showHome();
showValue(0);
button.attachClick(singleClick);
button.attachLongPressStart(longPressStart);
// Impostazione pin Modulo BTS7960
pinMode(R_EN, OUTPUT);
pinMode(L_EN, OUTPUT);
pinMode(R_PWM, OUTPUT);
pinMode(L_PWM, OUTPUT);
digitalWrite(R_EN, HIGH);
digitalWrite(L_EN, HIGH);
}
void loop() {
button.tick(); // Importante per rilevare eventi del pulsante
int encoderValue = encoder.read() / 4;
// Limita il valore tra 0 e 255
if (encoderValue < 0) {
encoder.write(0);
encoderValue = 0;
}
else if (encoderValue > 255) {
encoder.write(255 * 4);
encoderValue = 255;
}
if (encoderValue != lastEncoderValue) {
showValue(encoderValue);
}
lastEncoderValue = encoderValue;
// Calcola gli RPM
float RPM = encoderValue * coefficienteRPM; // Calcola gli RPM in base al valore PWM
// Approssimazione degli RPM all'intero
int RPM_int = round(RPM); // Arrotonda a intero
// Controllo direzione e velocità
if (direction) {
analogWrite(R_PWM, 0); // Assicuriamoci che RPWM sia spento
analogWrite(L_PWM, encoderValue);
}
else {
analogWrite(L_PWM, 0); // Assicuriamoci che LPWM sia spento
analogWrite(R_PWM, encoderValue);
}
}
void singleClick() {
encoder.write(0); // Azzera il valore dell'encoder
delay(10);
showValue(0); // Mostra il valore aggiornato sul display
analogWrite(R_PWM, 0);
analogWrite(L_PWM, 0);
}
void longPressStart() {
direction = !direction; // Inverti la direzione
showValue(lastEncoderValue); // Aggiorna il display con la nuova freccia
}
void showHome() {
oled.clearDisplay();
oled.setTextSize(2);
oled.setTextColor(WHITE);
String title = "MOTOR";
String subtitle1 = "Brushed";
String subtitle2 = "Test";
// Ogni carattere è circa 12 px con size 2
int titleX = (OLED_WIDTH - (title.length() * 12)) / 2;
int subtitle1X = (OLED_WIDTH - (subtitle1.length() * 12)) / 2;
int subtitle2X = (OLED_WIDTH - (subtitle2.length() * 12)) / 2;
oled.setCursor(titleX, 0);
oled.println(title);
oled.setCursor(subtitle1X, 25);
oled.println(subtitle1);
oled.setCursor(subtitle2X, 46);
oled.println(subtitle2);
oled.display();
delay(3000);
oled.clearDisplay();
oled.display();
}
void showValue(int encVal) {
int rpm = encVal * 40.14;
String valenc = String(encVal);
String etcrpm = String("RPM");
String valrpm = String(rpm);
oled.clearDisplay();
oled.setTextSize(2);
oled.setTextColor(WHITE);
oled.setCursor(0, 0);
oled.print("Encode:");
oled.println(valenc);
int etcrpmX = (OLED_WIDTH - (etcrpm.length() * 12)) / 2;
int valrpmX = (OLED_WIDTH - (valrpm.length() * 24)) / 2;
oled.setCursor(etcrpmX, 18);
oled.println(etcrpm);
if (direction) {
oled.drawBitmap(8, 16, frecciaSx, 24, 16, WHITE); // Mostra la freccia sinistra
} else {
oled.drawBitmap(96, 16, frecciaDx, 24, 16, WHITE); // Mostra la freccia destra
}
oled.setCursor(valrpmX, 36);
oled.setTextSize(4);
oled.println(rpm);
oled.display();
} |